Сегодня, 22 июня
- (Нет мероприятий)
Ближайшие мероприятия
-
16 сентября - 18 сентября
-
30 сентября - 02 октября
-
10 ноября - 13 ноября
-
01 февраля 2027 - 04 февраля 2028
Универсальная аппаратно-программная платформа автоматизации инженерного оборудования зданий
Максименко В.А., эксперт сектора обучения и информационной поддержки НВП «Болид»
Одним из основных трендов автоматизации инженерного оборудования зданий (АСУЗ) последнего времени является взаимное проникновение или конвергенция систем автоматизации зданий и систем безопасности с активным использованием IT-технологий. Как сказал и. о. ректора МГСУ А. А. Волков на форуме INTERSEC Rus в рамках выставки Intrlight в Москве в 2019 году: «Мировым трендом сегодня является когнитивность конвергентных систем», что отражает также использование для управления в АСУЗ таких современных технологий, как Big Data, IoТ и облачных технологий. Комплексное использование перечисленных технологий и элементов искусственного интеллекта позволяет поднять планку комфорта и безопасности АСУЗ на принципиально новый уровень.
При этом задачи, реализуемые АСУЗ в конкретных проектах, определяются требованиями групп пользователей этих проектов [1]. Общая структура АСУЗ [2]соответствует приведенной в ISO 16 484-2:
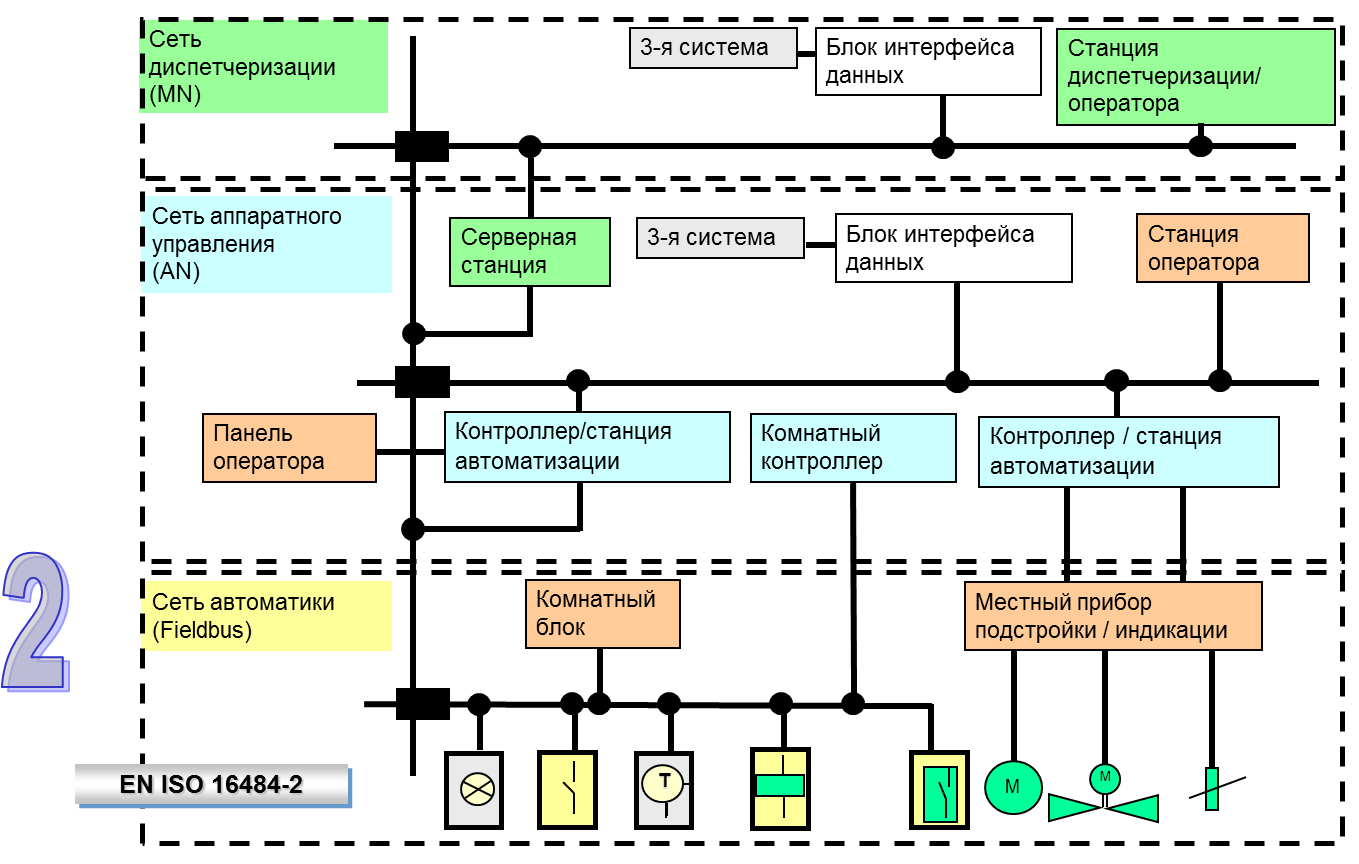
Рис. 1. Структура АСУЗ
Многолетний опыт разработки систем безопасности специалистами НВП «Болид» привел к тому, что в последние годы была разработана линейка приборов и программное обеспечение (ПО), реализующие на современном уровне структуру, показанную на рис. 1. При этом упомянутые приборы и ПО, по сути, представляют собой аппаратно-программную платформу (далее — платформа), позволяющую реализовывать задачи комфорта, безопасности и энергоэффективности с возможностью масштабирования и организации территориально распределенных решений. Реализация конвергентных функций систем безопасности и автоматизации зданий обеспечивается использованием проверенных аппаратных решений и современных алгоритмов управления.
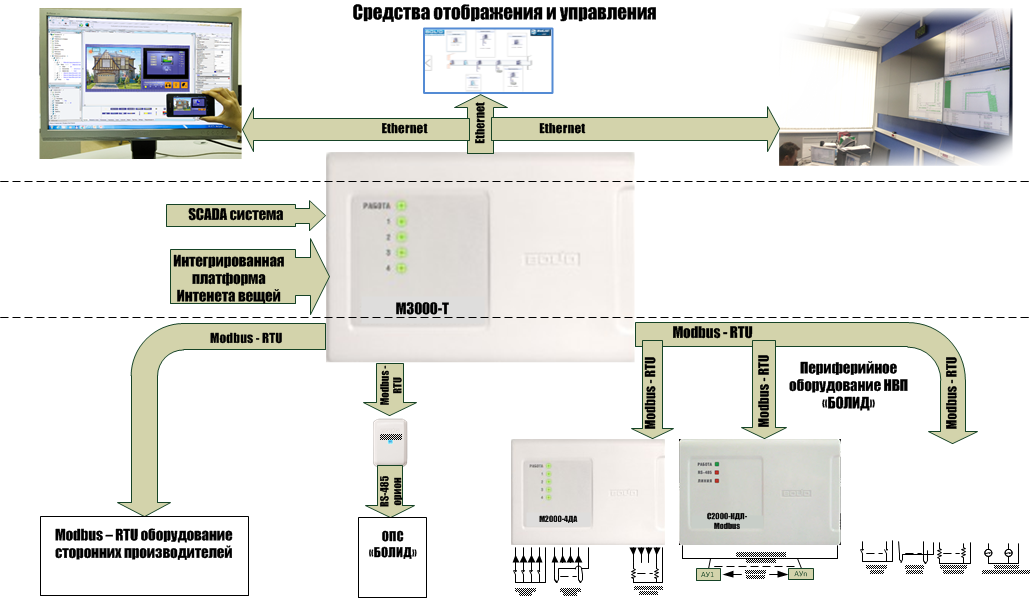
Рис. 2. Структура универсальной аппаратно-программной платформы АСУЗ
Характерной особенностью платформы является возможность построения законченной системы из типовых модулей путем тиражирования и масштабирования, а также возможности использования большинства модулей как автономных законченных решений.
Типовые модули платформы
Основными задачами, которые решает платформа, являются сбор и обработка данных от устройств полевого уровня, визуализация обработанной информации и обеспечение работы системы с локальными и удаленными пользовательскими интерфейсами, включая мобильные. В соответствии со структурой платформы (рис. 2) в качестве модулей полевого уровня используются:
— контроллер двухпроводной линии С2000-КЛД-ModBus:
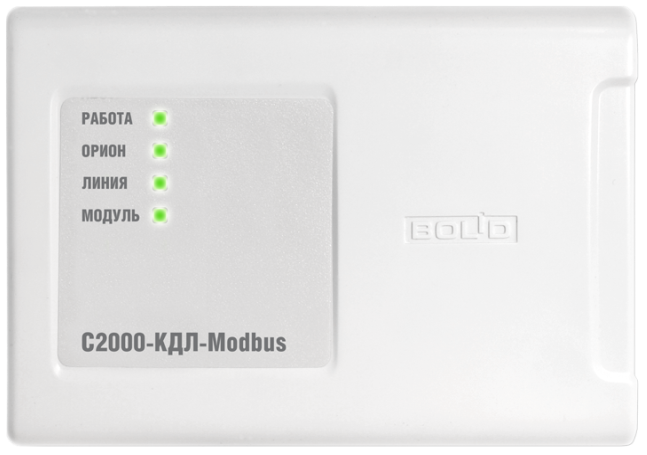
Рис. 3. Контроллер С2000-КЛД-ModBus
На двухпроводную линию этого контроллера можно подключать до 127 адресуемых устройств (датчиков и исполнительных устройств). При этом контроллер может работать в автономном режиме, реализуя ряд несложных логических алгоритмов работы.
— контроллер технологический С2000-Т:

Рис. 4. Контроллер С2000-Т
Полноценный контроллер с предустановленными алгоритмами управления системами отопления, горячего водоснабжения, вентиляции и кондиционирования с использованием ПИД-регуляции, каскадного регулирования, а также с возможностью формирования оригинальных алгоритмов управления оборудованием с использованием встроенного блока условий. Имеет на борту аналоговые и дискретные входы и выходы, а также интерфейсы RS-485 Орион ведущий и ведомый. При этом ведомый интерфейс при конфигурации может переводиться в режим ModBus RTU.
- модуль ввода-вывода М2000-4ДА:

Рис. 5. Модуль ввода-вывода М2000-4ДА
с аналоговыми и дискретными входами и дискретными выходами, а также дискретными выходами — релейными и транзисторными. Имеет простую встроенную логику и возможность ШИМ-регулирования.
— релейные модули М3000-ВВ-0010 и М3000-ВВ-1020
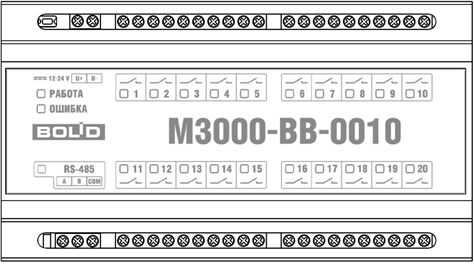

Рис. 6. Релейные модули М3000-ВВ-1020 и М3000-ВВ-0010
М3000-ВВ-0010 — поддерживает обмен данными в сети RS-485 по протоколу Modbus как ведомое устройство и позволяет управлять имеющимися в его составе 20 реле, коммутируя напряжение ~250 В 50 Гц и cos φ > 0,6 4 А. Позволяет управлять выходами с помощью ШИМ, при этом задавая период и коэффициент заполнения в широких пределах (максимальный период импульса 24 часа, минимальный 0,5 с).
М3000-ВВ-1020 — модуль из 6 перекидных реле с возможностью контроля состояния, управляемых по протоколу ModBus RTU.
С2000-ВТИ, С2000-ВТИ исп.01, С2000Р-ВТИ, С2000Р-ВТИ исп.01, М2000-ВТИ — термогигрометры с индикацией. Имеют встроенный ЖКИ, обеспечивают измерение температуры и относительной влажности воздуха и измерение концентрации угарного газа.
Ядром платформы является модуль уровня аппаратного управления на базе контроллера М3000-Т с ОС LINUX.

Рис. 7. Коммуникационный контроллер М3000-Т
Контроллер поддерживает все языки программирования, указанные в МЭК 61131-3. В качестве среды разработки и исполнения используется MasterSCADA 4D компании Инсат. В зависимости от решаемых задач наряду с MasterSCADA 4D могут использоваться также другие SCADA системы, например, КРУГ-2000, или Интеграционная платформа для Интернета вещей AggreGate. Соответствующие испытания успешно прошли в 2019 году. На борту контроллера находятся 4 интерфейса RS-485 ModBus RTU и интерфейс Ethernet. Благодаря наличию этих интерфейсов в соответствии с приведенной на рис. 2 структурой АСУЗ обеспечивается подключение периферийных устройств по протоколу ModBus RTU для сбора данных с датчиков и управления исполнительными устройствами. При этом могут использоваться как устройства, производимые НВП «Болид», так и широкий спектр оборудования ModBus RTU сторонних производителей. Необходимо отметить, что решение допускает также использование информации о состоянии установленного на объекте оборудования безопасности при помощи преобразователя интерфейса С2000-ПП.
При использовании MasterSCADA 4D может быть организован доступ к платформе с использованием интерфейса Ethernet-контроллера через любой интернет-браузер (за исключением Internet Explorer).
Структура платформы
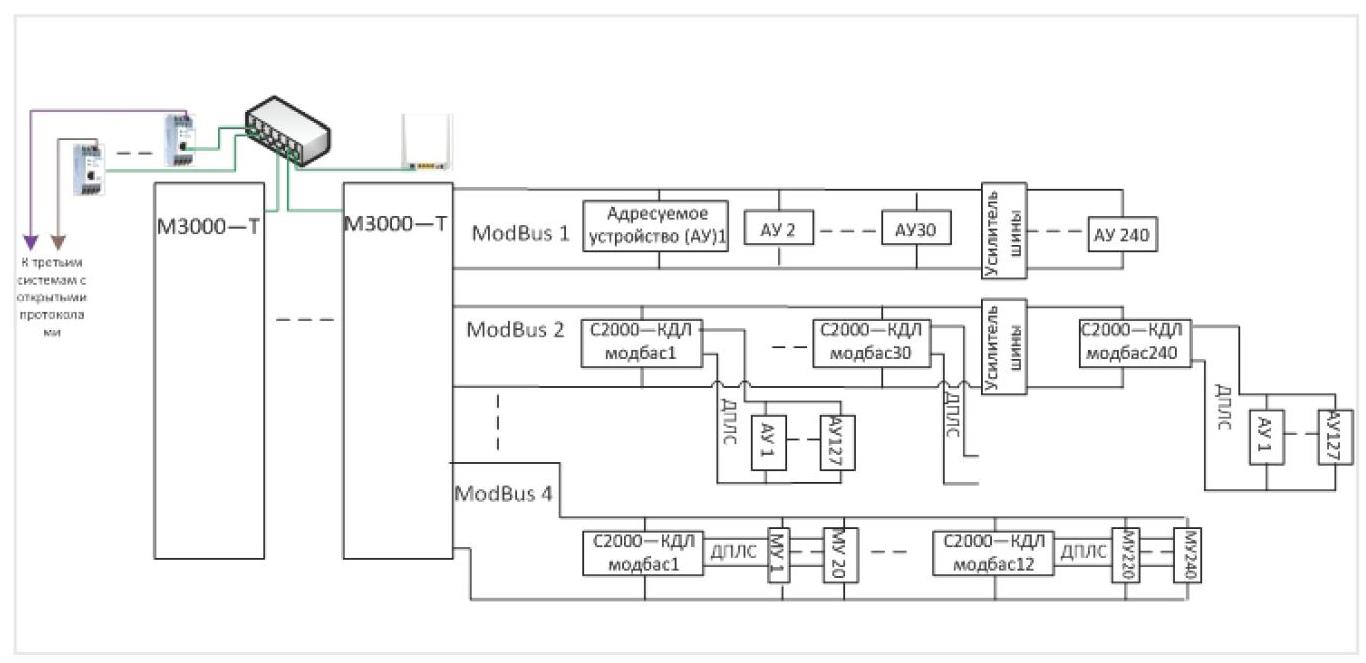
Рис. 8. Общая структура системы
Общая структура системы может иметь вид, представленный на рис. 8.
Эта структура системы отражает ограничения, накладываемые спецификацией протокола ModBus. На рис. 8 представлены 3 основных варианта реализации системы на базе линейки приборов М3000-Т. Контроллер М3000-Т имеет в своем составе 4 канала для подключения шины ModBus. Первый вариант подключения к шине, обозначенный как ModBus 1, показывает шинное подключение адресуемых устройств к шине ModBus. При этом максимальное количество подключаемых к шине адресуемых устройств в нашем случае составляет 240. Теоретически на такой шине можно адресовать до 255 адресов. На практике обычно ограничиваются 247 адресами, что, в принципе, возможно и в нашем случае. Вторая важная особенность этой шины заключается в рекомендациях ряда производителей использовать шинные усилители не реже, чем после каждого 31 устройства.
Канал ModBus 2 иллюстрирует вариант подключения к контроллеру М3000-Т в качестве адресуемых устройств приборов С2000-КЛД-ModBus. В данном случае эти приборы подключаются к шине ModBus RTU, поэтому их количество теоретически составляет до 240 приборов, а к каждому из них на двухпроводную линию связи (ДПЛС) можно подключить до 127 адресуемых устройств. При этом приборы, подключенные к ДПЛС, получают от нее питание. При использовании такого подключения следует учитывать, что время обработки контроллером одного прибора С2000-КДЛ-ModBus может составить до 100 миллисекунд при подключении около 100 адресуемых устройств на его ДПЛС.
Канал ModBus 4 отличается от предыдущего варианта тем, что в данном случае к каналу ModBus подключаются как приборы С2000-КЛД-ModBus, так и модули, использующие для обработки информации из управляемого помещения такие приборы, как С2000-Т, М2000-4ДА, М3000-ВВ-0010 и М3000-ВВ-1020. В корпусе модуля могут быть собраны приборы, необходимые для получения и обработки информации из конкретного помещения. Кроме того, подключенная к каждому модулю ДПЛС от прибора С2000-КЛД-ModBus позволяет при необходимости использовать в зоне расположения модуля адресуемые устройства ДПЛС.
Необходимо также отметить временные особенности работы шины ModBus: для опроса 10 переменных из 4 ведомых со скоростью 19200 бит/с необходимо затратить примерно 206 мс. Если необходим периодический опрос, желательно зарезервировать определенное время, например, еще дополнительно 100 мс.
В случае если производится интенсивная запись больших объемов во встроенную память контроллера, может произойти «затирание» этой памяти, что повлечет снятие с гарантии.
Типичная ошибка, приводящая к расходу ресурса памяти, — это архивирование процесса пользователем со временем цикла задачи, в которой объявлены переменные с атрибутом «архивирование». То есть если время цикла такой задачи составляет 100 мс, то при архивировании в этой задаче только одной переменной типа «вещественное», ячейка памяти в 8 байт будет записываться 10 раз в секунду, 600 раз в минуту, 36 000 раз в час, 864 000 циклов записи в сутки. За это время записанный архив (лишь одной вещественной переменной без меток времени) составит 6 912 000 байт. Используемый тип памяти — eMMC имеет ресурс порядка 3000 циклов перезаписи. Очевидно, что запись во встроенную память контроллера с такой интенсивностью приведет к ее преждевременному «затиранию».
Контроллер сам перераспределяет уже стершиеся блоки памяти как неиспользуемые, в связи с чем оставшийся объем будет постоянно уменьшаться.
При необходимости сохранения архивов оперативных параметров необходимо:
— архивирование производить на внешние носители информации — SD-карты и USB-накопители;
— архивировать промежуточные переменные, которые объявлены в задаче с большим временем цикла, к примеру — 1 минута;
— архивировать медленно меняющиеся переменные (параметры) только тогда, когда они изменяются или существенно изменяются (запись по изменению).
Интерфейс Ethernet позволяет подключать контроллеры М3000-Т, аппаратные IP-шлюзы открытых протоколов, таких как KNX, LON, BACNet, Wi-Fi-роутеры и другое аналогичное оборудование.
Примеры реализуемых платформой задач, иллюстрирующие ее возможности
- Реализация управления и контроля состояния помещения офисного комплекса

Рис. 9. Компоновка модуля помещения офисного комплекса
На рис. 9. приведена компоновка модуля управления и контроля состояния помещения офисного комплекса. Модуль как таковой представляет собой законченное локальное решение для управления включением нагрузок отдельного помещения с помощью карточного выключателя, установленного при входе. В качестве нагрузок в данном примере выступают освещение, розетки, кондиционер. Управление осуществляется с помощью логики прибора С2000-КЛД-ModBus, позволяющей включать и отключать кондиционер по датчику температуры, при открытии окон, включать свет при наличии людей в помещении по датчику движения. Модуль допускает установку в него дополнительных реле, например для включения увлажнителя по датчику влажности или для подачи тревожного сигнала секретарю с помощью тревожной кнопки и т. п. Исполнение модуля в соответствии с рис. 8 вариант ModBus 4 показан на рис. 10:

Рис. 10. Компоновка модуля помещения офисного комплекса. Исполнение 1
В этом исполнении функционал модуля дополнен функциями контроля доступа на базе считывателя, подключенного к контроллеру С2000-КДЛ-ModBus, а также дополнительными управляемыми нагрузками с возможностью расширения за счет большой коммутационной емкости блока реле М3000-ВВ-0010. Поскольку приборы С2000-КДЛ-ModBus и М3000-ВВ-0010 являются ведомыми на интерфейсе ModBus RTU, данное исполнение в части управления прибором М3000-ВВ-0010 работает только при наличии связи с коммуникационным контроллером М3000-Т по линии ModBus RTU.
Модули имеют интерфейсный выход по протоколу ModBus RTU, что позволяет использовать один или несколько таких модулей при решении следующей задачи:
- Реализация управления и контроля состояния помещений офисного комплекса с отображением на мобильных устройствах

Рис. 11. Компоновка модуля помещений офисного комплекса с отображением на мобильных устройствах
Реализация решения управления и контроля состояния помещений офисного комплекса с отображением на мобильных устройствах представляет собой набор из двух модулей, рассмотренных в предыдущем примере. Под конкретную задачу такие модули допускают соответствующую доработку с целью полноценной реализации необходимого функционала. Кроме того, в решении присутствует рассмотренный ранее модуль на контроллере М3000-Т — ядро платформы. На борту этого контроллера находится предустановленная SCADA-система MasterSCADA -4D компании Инсат. Эта SCADA-система с ModBus-каналов контроллера получает информацию от подключенных модулей, обрабатывает ее и обеспечивает визуализацию этой информации и выдачу ее на мобильные средства пользователей системы в соответствии с присвоенными им правами доступа. Выдача осуществляется по каналу Ethernet и может транслироваться через Wi-Fi-роутер. Функционально решение поддерживает все возможности SCADA-системы в части обработки и отображения поступающей на контроллер информации от периферийных модулей. В соответствии с представленной на рис. 8 структурой решение может поддерживать число различных модулей, в том числе приведенных в разделе «Типовые модули платформы», необходимое для сбора данных с достаточно большого объема инженерного оборудования контролируемого объекта.
- Реализация управления и контроля состояния помещений территориально распределенных офисных комплексов с функциями формирования произвольных отчетов и превентивного управления
В соответствии со структурой, приведенной на рис. 8, решение на базе платформы может использовать несколько модулей с контроллерами М3000-Т, каждый из которых может иметь свой набор периферийных модулей, что обеспечивает большую гибкость решения. При этом для связи между контроллерами М3000-Т могут использоваться IP-каналы связи, обеспечивающие практически неограниченную удаленность контроллеров друг от друга. Это позволяет реализовывать территориально разнесенные решения. В этом случае для обеспечения взаимодействия между контроллерами и обработки существенно больших объемов информации, генерируемых системой, могут применяться такие программные средства, как интеграционные платформы для Интернета вещей. Вариант такого решения представлен на рис. 12.
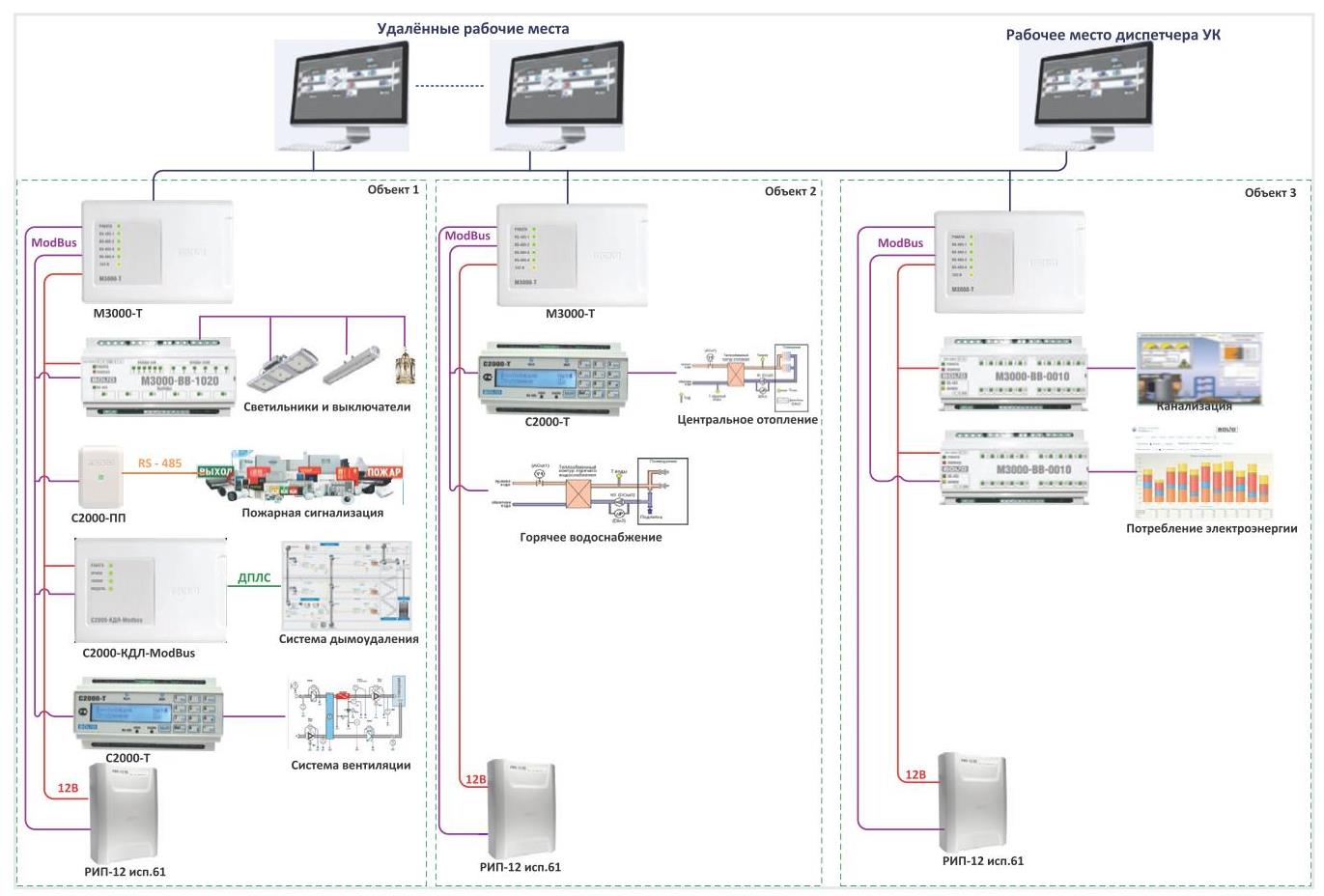
Рис. 12. Вариант территориально распределенного решения на базе платформы
В данном случае контроллеры М3000-Т обрабатывают информацию, поступающую с оборудования подключенных к ним объектов. Сеть Ethernet в данном случае понимается в широком смысле как среда, т. е. контроллеры М3000-Т могут располагаться в разных точках этой среды, включая удаленные подключения, а также рабочие места могут быть как локальными, так и удаленными в зависимости от решаемой задачи. При использовании контроллером М3000-Т SCADA системы Master SCADA-4D компании Инсат для отображения на рабочих местах могут использоваться любые интернет-браузеры (кроме Internet Explorer).
Таким образом, рассматриваемая аппаратно-программная платформа управления инженерным оборудованием зданий обеспечивает:
— соответствие структуры требованиям ISO 16 484;
— оперативное построение практического решения из разработанных модулей, включающих базовое ПО, начиная от локальных автономных решений с возможностью поэтапного расширения до территориально распределенных решений;
— возможность развертывания на базовом контроллере SCADA систем и программных платформ Интернета вещей в зависимости от потребностей заказчика и решаемых задач;
— возможность использования в качестве периферийного оборудования любого ModBus-RTU-оборудования, а также оборудования ранее установленных на объектах систем ОПС НВП «Болид»;
— возможность вывода информации на любые удаленные средства отображения через web-браузер;
— оптимизацию обслуживания системы за счет использования типовых решений и оборудования;
— конкурентное соотношение цена/качество предлагаемого решения;
— возможность модернизации и расширения реализованных решений с минимальными затратами средств и времени.
Литература
- Максименко В. А. Комплексная концепция функционирования инженерных систем, систем безопасности и управления как основа обеспечения устойчивости объекта // Сборник трудов Международной научно-практической конференции «Охрана, безопасность, связь -2015», Воронеж. — 2015 . — Часть 1. — С. 85–86.
- АВОК Стандарт — 5 — 2004 Отраслевой стандарт. Системы автоматизации и управления зданиями. Часть 2. Основные положения. Аппаратные средства.
Скачать PDF-версию статьи «Универсальная аппаратно-программная платформа автоматизации инженерного оборудования зданий»